11-08-2015, 15:49
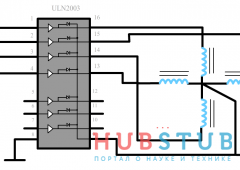
Всё началось с того, что в одном из устройств надо было поворачивать вал электродвигателя на определённое количество оборотов, большая точность не требовалась плюс-минус четверть оборота, поэтому было принято решение реализовать это с помощью электродвигателя постоянного тока. В качестве управляющего элемента был выбран микроконтроллер — Atmega16, но так как выходное напряжение выводов Atmega16...